


แพลตฟอร์มเทคโนโลยี และ
วิทยาการหุ่นยนต์
สำหรับการก่อสร้างเขื่อน
ในประเทศญี่ปุ่นเกิดน้ำท่วมเอ่อล้นแม่น้ำและการขาดแคลนน้ำซ้ำแล้วซ้ำเล่ามาแต่อดีต
จึงมีการสร้างเขื่อนขึ้นทั่วประเทศ
การก่อสร้างเขื่อนถือเป็นโครงการขนาดใหญ่ที่ต้องใช้เวลานานมาก
แม้ว่าจะต้องใช้บุคลากรจำนวนมากในช่วงเวลายาวนาน
แต่การถ่ายทอดเทคโนโลยีนั้นทำได้ยากเนื่องจากจำนวนงานก่อสร้างมีจำกัด





บริษัทโอบายาชิจึงได้พัฒนาเทคโนโลยีการก่อสร้างซึ่งใช้ประโยชน์จากข้อมูลที่หลากหลาย
โดยหลอมรวมเทคโนโลยีการก่อสร้าง ที่เราสั่งสมจากประสบการณ์การก่อสร้างเขื่อน
มาเป็นเวลายาวนาน เข้ากับเทคโนโลยีดิจิทัล เช่น ICT, IoT และ AIและเรียกมันว่า "ODICT (Obayashi-Dam Innovative Construction Technology)"

สำหรับการสร้างเขื่อนที่ดำเนินการโดยบริษัทโอบายาชิ
เราจะเลือกใช้เทคโนโลยีให้เหมาะสมกับเนื้อหาการก่อสร้าง
ในขั้นแรก
สำหรับการก่อสร้างตัวเขื่อนคาวาคามิ
ซึ่งเริ่มดำเนินการในปี 2017 ( เมืองอิกะ จังหวัดมิเอะ)
เราได้นำเทคโนโลยีกว่า 20 ชนิด ซึ่งรวมถึงเทคโนโลยีที่พัฒนาขึ้นใหม่มาใช้ตามลำดับ
มีการใช้เทคโนโลยีวิทยาการหุ่นยนต์หลายอย่าง ที่สามารถควบคุมจากระยะไกลและทำงานอัตโนมัติได้ตลอดการก่อสร้าง
Robotics
-
Remote operation of construction
machinery using 5G
-
Autonomous crane operation

-
Automated green cutting operation




-
Automated sliding system
for dam formwork
-
Automated concrete transportation
using tower cranes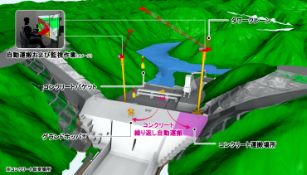
-
Automatic Dump Truck System




-
Surrogate

-
Surrogate
-
-

-
Vehicle management system using infrared camera

-
Concrete construction management system
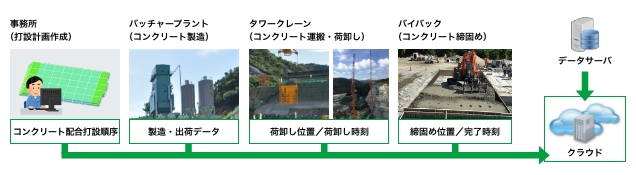


-
Dam concrete compaction
determination system
-
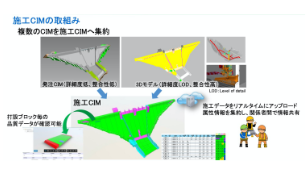
Initiatives for CIM in construction
-
Envital




In Focus
ทาวเวอร์เครน
ระบบขับเคลื่อนอัตโนมัติ


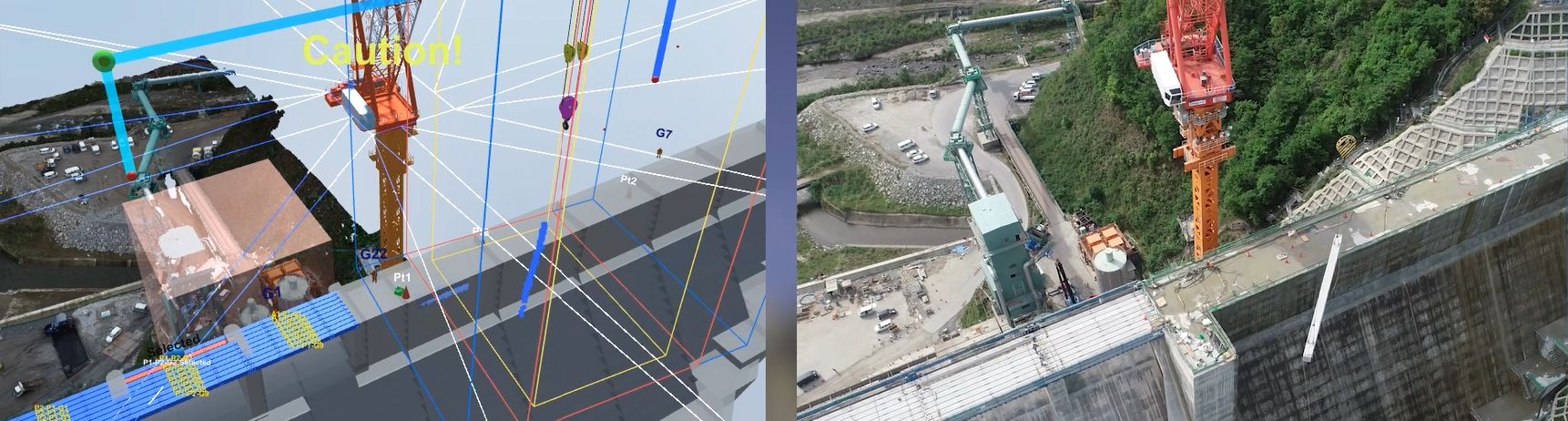
ในระบบนี้ AI จะสร้างเส้นทางการขนส่งที่เหมาะสมที่สุดโดยอัตโนมัติบน CPS (Cyber Physical Systems) ที่สร้างจากข้อมูล BIM / CIM และข้อมูลพอยต์คลาวด์ซึ่งได้รับจาก 3D-LiDAR และขับเคลื่อนทาวเวอร์เครนแบบอัตโนมัติ
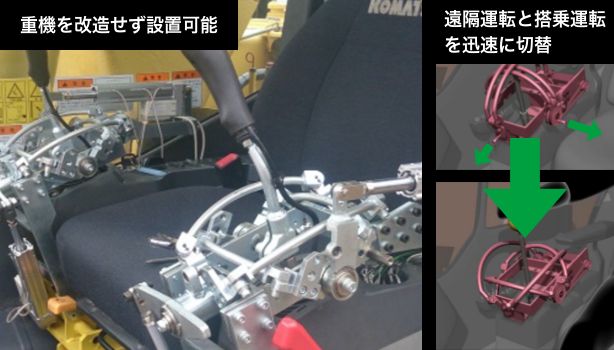
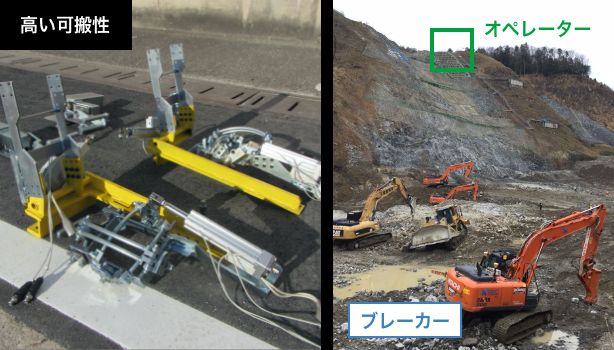
Surrogate

นอกจากนี้ ที่เครื่องจักรก่อสร้าง เช่น รถแบคโฮ ฯลฯ ยังมีการติดตั้งอุปกรณ์ควบคุมระยะไกลอเนกประสงค์ "Surrogate" ซึ่งมีขนาดกะทัดรัดและสามารถติดตั้งหรือถอดออกได้ง่าย ทำให้สามารถปฏิบัติงานโดยเลือกควบคุมเครื่องจักรแบบมีคนขับ หรือแบบไร้คนขับผ่านการควบคุมระยะไกล ตามความอันตรายของสถานที่ปฏิบัติงานและสภาพงานได้












การขับเคลื่อนอัตโนมัติ



นอกจากนี้ ในปี 2020 เราได้ทดลองสาธิตการขับเคลื่อนแบบอัตโนมัติของรถดัมพ์ขนาดใหญ่ที่ไซต์งานก่อสร้าง ซึ่งมีทั้งทางโค้งแคบๆ และทางลาดชัน ทั้งยังมีรถดัมพ์แบบมีคนขับซึ่งปฏิบัติงานก่อสร้างเขื่อนคาวาคามิวิ่งไปมาด้วย ในอนาคตเราวางแผนที่จะพัฒนาเทคโนโลยีโดยมีเป้าหมายสู่การทำงานแบบครบวงจร ตั้งแต่การบรรทุกของขึ้นรถ การขนย้าย ไปจนถึงการนำของลงจากรถ รวมทั้งการใช้งานยานยนต์ไร้คนขับหลายๆ คันด้วย
บริษัทโอบายาชิ กำลังดำเนินการเพื่อสร้างระบบอัตโนมัติ ในอนาคตอันใกล้นี้
สำหรับเครื่องจักรกลหนักและรถดัมพ์
ซึ่งมีสัดส่วนสูงในงานวิศวกรรมโยธาของเรา
และรับรู้บริเวณที่ห่างไกลออกไปรวมทั้งบริเวณรอบๆ
ในรูปแบบของข้อมูลพอยต์คลาวด์สามมิติแบบเรียลไทม์ระบบซึ่งแสดงสิ่งที่จับต้องได้ (ความเป็นจริง) บนพื้นที่ไซเบอร์ (เสมือน) ในคอมพิวเตอร์, ทำการวิเคราะห์,
แล้วให้ข้อมูลย้อนกลับว่า อะไรเหมาะสมที่สุดสำหรับโลกความเป็นจริง