


ダム建設の技術プラットフォームとロボティクス
古くから河川の氾濫と水不足が繰り返されてきた日本では、
全国各地でダムが建設されてきた。
ダム建設は、非常に長い年月を要する大規模な事業だ。
長期にわたって多くの人員を確保しなければならない一方、
施工数が限定的であるため技術の伝承も難しい。





そこで大林組は、長年のダム建設の経験を通して蓄積してきた
施工技術とICTやIoT、AIといったデジタル技術を融合させてさまざまな情報化施工技術を開発し、それらを「ODICT(Obayashi-Dam Innovative Construction Technology)」として集約。

大林組が施工するダム建設工事で、
施工内容に応じて技術を選択し、適用していくこととした。
その第一弾として、
2017(平成29)年に着工した
川上ダム
本体建設工事
(三重県伊賀市)では、
新たに開発したものを含めて20を超える技術を順次適用。
工事全体で遠隔化、自動化を可能とするロボティクス技術を多数採用している。
Robotics
-
5Gを活用した建設機械の遠隔操作

-
クレーン自律運転

-
グリーンカット自動運転




-
ダム型枠自動スライドシステム

-
タワークレーンを用いた
コンクリート自動運搬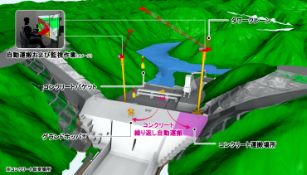
-
ダンプトラック自動運転




-
サロゲート

-
サロゲート
-
-

-
赤外線カメラを用いた車両管理システム

-
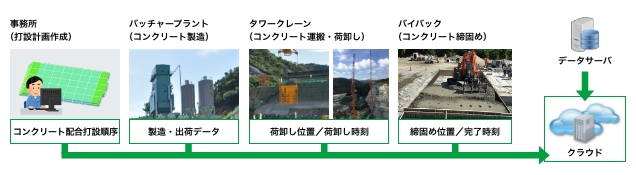
コンクリート施工管理システム


-
ダムコンクリート締固め判定システム

-
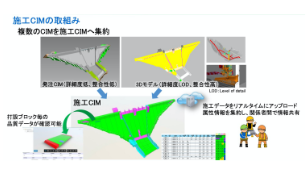
施工CIMの取組み
-
Envital




In Focus
タワークレーン
自律運転システム


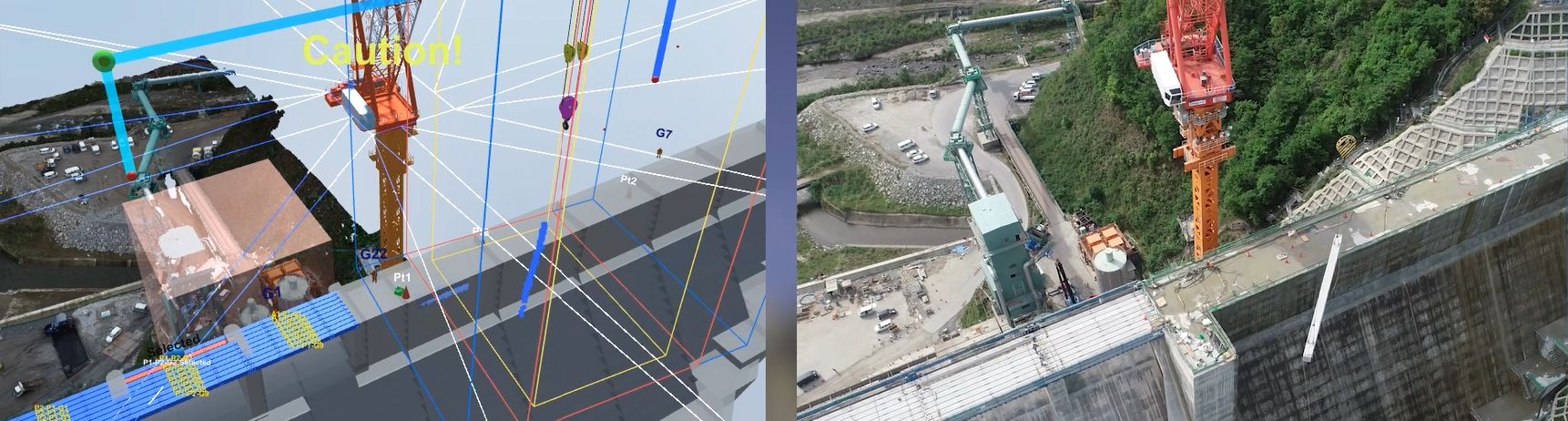
このシステムでは、BIM/CIMデータや3D-LiDARから取得された点群データにより構築されたCPS(Cyber Physical Systems)上に、AIが最適な運搬経路を自動生成し、タワークレーンを自律運転する。
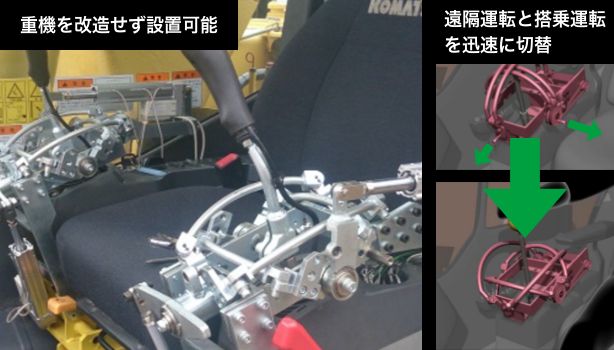
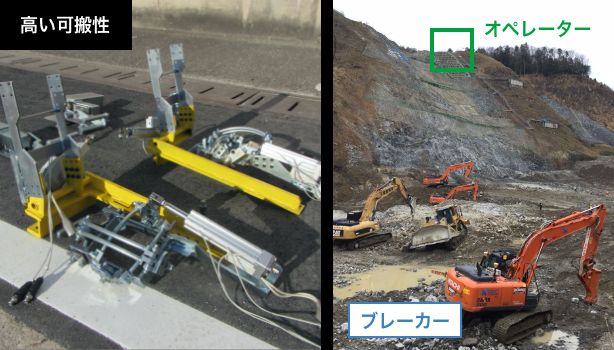
サロゲート

またバックホウなどの建設機械には、コンパクトで容易に着脱できる汎用遠隔操縦装置「サロゲート」を搭載し、作業を行う場所の危険性や作業状況に応じて、搭乗操縦と、遠隔操縦による無人運転を切り替えながら作業を進めている。












自動運転



さらに2020(令和2)年には、川上ダム建設の作業を行う有人ダンプが行き交うなか、狭いカーブや急勾配もある現場で、大型ダンプトラック自動運転の実証実験を実施した。このあとは荷積み・運搬・荷降ろしまでの一貫したオペレーションや、複数台の自動運転車の運用などをめざし、技術開発を進める予定だ。
大林組は、土木工事の大きなウェイトを占める
重機やダンプの自動化について、
遠くない未来に実現すべく取り組んでいる。