- 4 Technology
- Technology Development
An Autonomous Excavator Operating System Which Automates Excavation and Soil Loading Work
We have developed an autonomous excavator operating system which automates excavation and soil loading work.
Ensuring high productivity and safety with the skills and knowledge of technically skilled workers and high-precision control like real life experience.
Obayashi Corporation, NEC Corporation (https://www.nec.com/, hereinafter referred to as “NEC”), and TAIYU Co., Ltd. (http://taiyu-corp.com/eng/, hereinafter referred to as “TAIYU”) have jointly developed an autonomous excavator operating system which automates excavation work, as the first phase of the automation of construction machinery.
In the construction industry, a labor shortage caused by the aging of skilled workers and the decline in young employees has become an urgent issue, so an increase in productivity achieved by automation is urgently needed. For that reason, automation of construction using heavy construction equipment, especially technical development for replicating heavy equipment operation by technically skilled workers, is the focus of high expectations.
On this occasion, the three companies of Obayashi Corporation, NEC and TAIYU began the joint development of technology which efficiently increases productivity by automation of general-purpose construction machinery in order to capitalize on the technologies, skills and knowledge possessed by each company, and as the first phase of the joint development they have developed an autonomous operating system for excavators.
The autonomous excavator operating system automatically carries out the excavation work which is a tedious task in civil engineering projects such as ground preparation, tunnel excavation and underground excavation for large buildings. Excavation work requires a high degree of skill to effectively control excavators' arms, booms and buckets, which makes it difficult to achieve automation.
Therefore, we installed the SURROGATE, a General-Purpose Remote Control Device jointly developed by Obayashi Corporation and TAIYU for the excavators and then prepared an operational plan tailored to target soil and dump truck conditions based on the knowledge of Obayashi Corporation, and applied in NEC’s Adaptive Predictive Control Technologies in order to carry out control which incorporates the impact of the constantly changing excavator dynamic characteristics and the effects of response delays. In addition, by utilizing the skills of technically skilled workers and implementing AI technologies, we can replicate the movement of machines with high precision during excavation and loading.

The features of the automated excavator operating system are as follows.
-
Measuring accuracy, safety and enhancing productivity
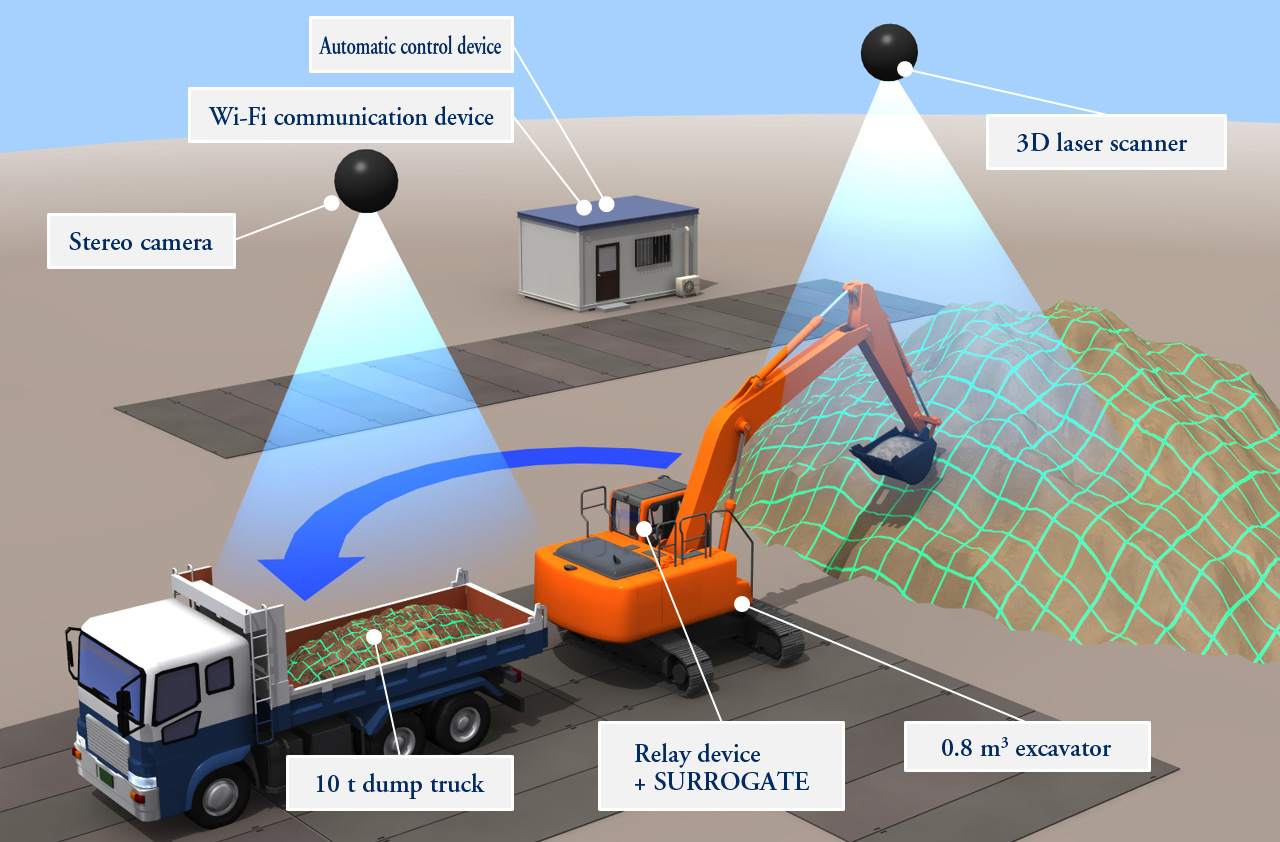
The automated excavator operating system uses a 3D scanner to check the status of embankments in an excavation area, determines the points at which the amount of soil loaded per excavation is maximized, excavates the soil, turns to a dump truck standing by, and repeatedly loads the dump truck while monitoring progress with a camera inside the vessel. In order to improve the precision of operations, the system produces optimal operation plans for excavators in a series of tasks and utilizes the Adaptive Predictive Control Technologies developed by NEC to implement control for incorporating the dynamic characteristics unique to the excavator.
In addition, the system analyzes the work data of a large number of technically skilled workers to quantify the efficiency of their operations and corrects the operations according to the positions of the dump trucks or excavators, which differ depending on the earth conditions and for each task, in order to realize high productivity modeled on the movements of technically skilled workers.
Furthermore, when the soil loaded into a dump truck reaches a specified weight, work stops automatically until another dump truck arrives. Therefore, it is not necessary for any personnel to enter the worksite. In the unlikely event of a worker's entry, the QuattroEyes system, developed by Obayashi Corporation, is installed to ensure safety by preventing contact through the fail-safe measures previously cultivated.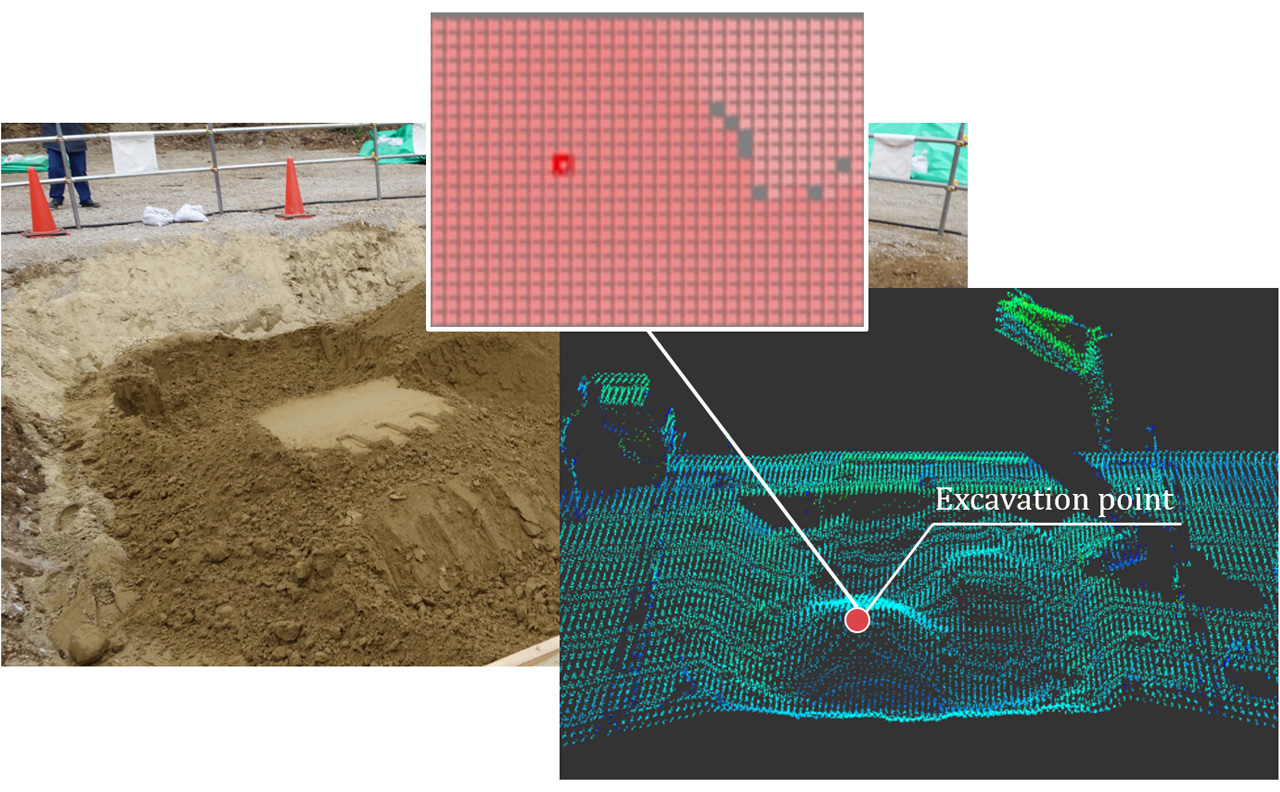
Sensing of the excavation position -
Easy automation because the SURROGATE can be retrofitted to any model of excavator
Control of the excavators is not direct control using electrical signals, etc.; rather it is carried out via the SURROGATE General-Purpose Remote Control Device jointly developed by Obayashi Corporation and TAIYU. SURROGATE is an attachment installed on the operating lever part and is compatible with any model. Therefore, the automated excavator operating system can be mounted on any commercially available excavator, regardless of the type of mounting system. Furthermore, since switching between automated operation and remote control by the operator can be easily done, it is possible to quickly and flexibly respond when sudden events occur during automated operation and when complicated operations for which autonomous driving is difficult become necessary.
-
An integrated control system that enables great labor-saving
The automatic excavator operating system is managed by a networked control system that deploys a large number of sensors of various types for recognizing the work areas and position of construction machinery in places where the work areas and excavators, etc. are easily recognized, and integrates and controls the sensors with a communications network. Therefore, it is possible for the administrator to remotely check and manage these large amounts of information from not only the viewpoint on board but also the panoramic viewpoint. In the future, a next-generation communications technology, 5G, will enable faster, larger-capacity, and lower-delay communication, allowing multiple types of construction machinery to be automated at the same time by a single supervisor, and thereby enabling further productivity and labor savings.
Going forward, Obayashi Corporation will promote the building of next-generation construction production systems capable of realizing high productivity and high safety even with few technicians. In the future, the company aims to contribute solving the problem of the shortage of technically skilled workers in the construction industry through field sales of these systems.
NEC will leverage the results of this collaboration to develop solutions that can be utilized on construction sites and thereby contribute to improve the efficiency and safety of construction work. Moreover, NEC will utilize the network flexibly to accelerate the provision of NEC Smart Connectivity, which intelligently links the necessary data to people and goods, in order to create new social value.
With the aim of making the remote and automated control of all construction equipment readily available, TAIYU will promote the development and dissemination of SURROGATE and training programs for its operators.You can view on video a demonstration of the autonomous excavator operating system carried out at the East Japan Robotics Center.
NEC’s original control technology combining "adaptive control" which adapts to changes in the dynamic characteristics of the controlled object, and "predictive control" which responds to response delays by predicting the movements of the controlled object.
The characteristics of the output (the movement of the arms on excavators) when the input (a lever operation on excavators) changes over time. In the case of excavators, the lever operation and the way the arms move as a consequence of the lever operation differ greatly depending on the work content.
One form of control system. A system which uses a communications network to gather the sensor data necessary for control and controls the objects via a communications network.
- Management and
Organization- The Articles of Incorporation
- Basic Principles
- Transitioning of Corporate Symbol
- Corporate Officers
- Organization Chart
- Stock Information
- Financial Statements
- Technology
- BIM Timeline
- Awards
- Major Publication
- Group Companies
- Group Companies (in Japan)
- Group Companies (Overseas)