安全で効率的なクレーン操作を支援するマシンガイダンスシステムを開発しました
-
プレスリリース
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)は、BIM(Building Information Modeling)を活用して、建設現場を3次元モデルで再現し、クレーンに取り付けたセンサー情報と連携させ、オペレーターにクレーンの状況をリアルタイムに表示することで、安全で効率的なクレーン操作を支援するマシンガイダンスシステムを開発しました。
建設現場の揚重作業でクレーンを操作するオペレーターは、クレーン同士の衝突や近接する構造物との接触、重要無線通信の電波伝搬路妨害や航空法による高さ制限違反、敷地境界線からの越境などに細心の注意を払っています。従来の作業範囲規制装置にも、作業禁止範囲への接近をオペレーターへ警告する機能はありますが、オペレーターが確認する画面は2次元の情報が表示されるため高さを把握しにくいという課題がありました。
また、オペレーターの経験が浅い、死角や悪天候により視界が悪いなどの場合には、オペレーターと作業員との無線連絡の頻度を増やす必要があり、条件によっては作業を中止せざるを得ないため、作業効率の低下を招いていました。
今回開発したマシンガイダンスシステムは、3次元モデルを利用することによりオペレーターが任意の視点からクレーンの状況を確認でき、死角などがある場合にも目視同等の判断を可能とします。加えて、揚重部材を取り付け位置まで安全に運搬するため、必要な操作量をガイダンス表示する機能も備えています。
近年、「サイバーフィジカルシステム(Cyber Physical Systems:以下CPS)(※1)」によりものづくりを進化させる動きが、製造業などで活発になっていますが、本システムにおいてもCPSの概念を取り入れ、3次元モデルで建設現場を再現したサイバー空間と実際のクレーンの動きを融合させることで情報化施工のシステムを実現しています。
マシンガイダンスシステムの特長は以下のとおりです。
クレーンの動きと建設現場の情報を3次元で表示することで安全性が大幅に向上
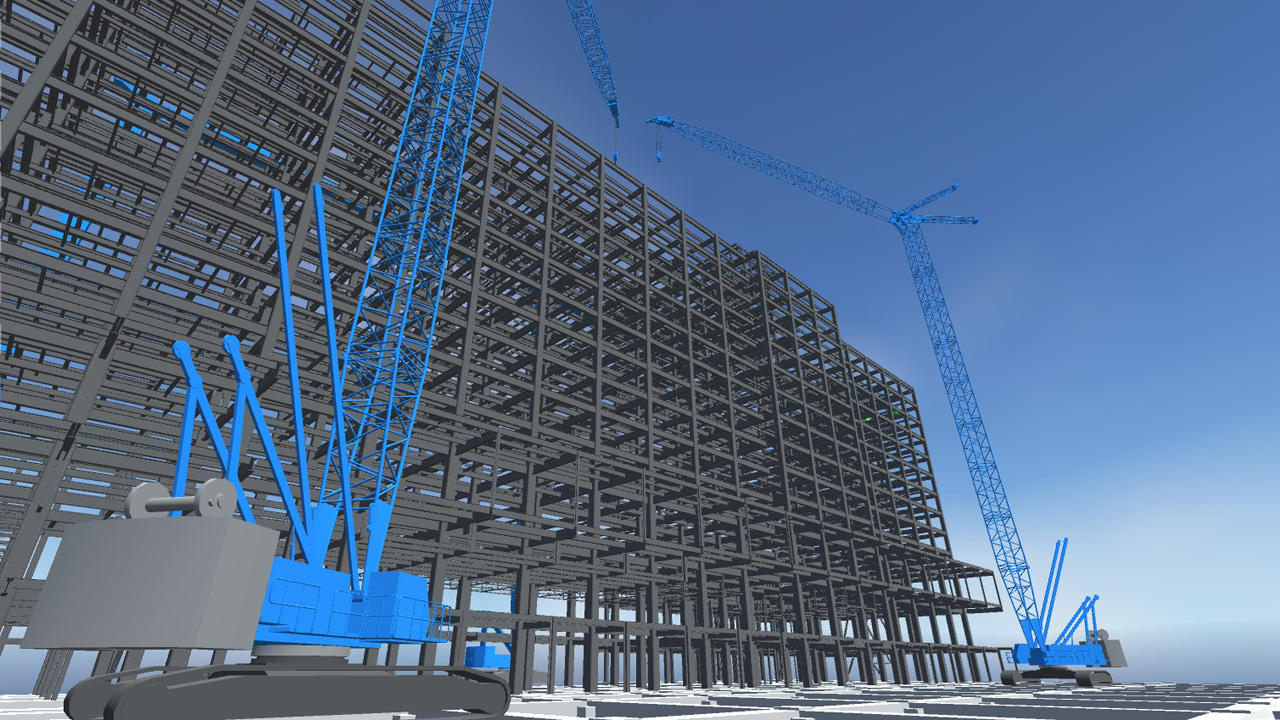
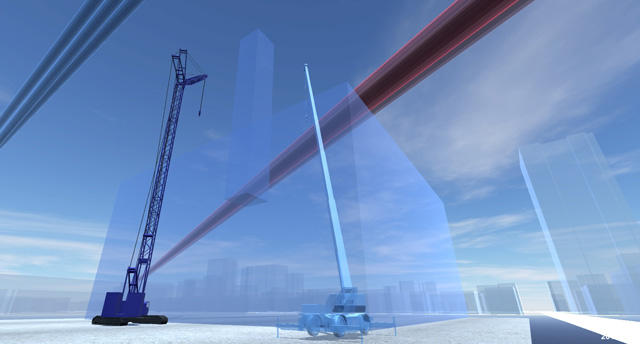
無線センサーから取得したクレーンの動きを、建設現場を再現した3次元モデル上で融合させ、クレーン操作室内のタッチパネルに表示します。BIMを活用した3次元モデルにより、施工対象物や周囲の構造物だけでなく目に見えない電波伝搬路や航空法による高さ制限、敷地境界線なども可視化して表示します。
本システムは、オペレーターが通常目視できないクレーンと周囲の位置関係をタッチパネルの操作により任意の視点から俯瞰的な画像で確認し、目視から得られる情報を補完することで、死角がある場合や、夜間や悪天候時の視界が悪い状況においても安全なクレーン操作を可能とするシステムです。また、画面上に警告を発することで作業禁止範囲への侵入を防ぎます。

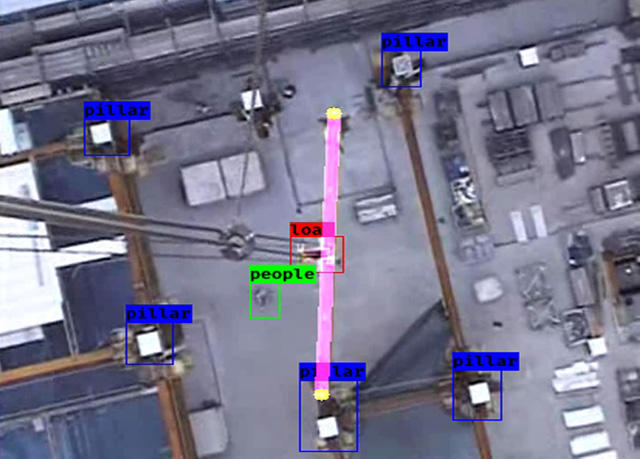
3次元モデルに反映できないクレーン下の状況確認にはAIも活用します。AIが、クレーンから下向きに設置したカメラの映像を基に、クレーンのフックや柱、作業員などの位置を認識し、吊り荷と建設物との接触や、作業員の吊り荷直下への侵入といった危険な状況を検知して警告することで、さらに安全性が向上します。
オペレーターの経験に関係なく効率的で正確な作業が可能
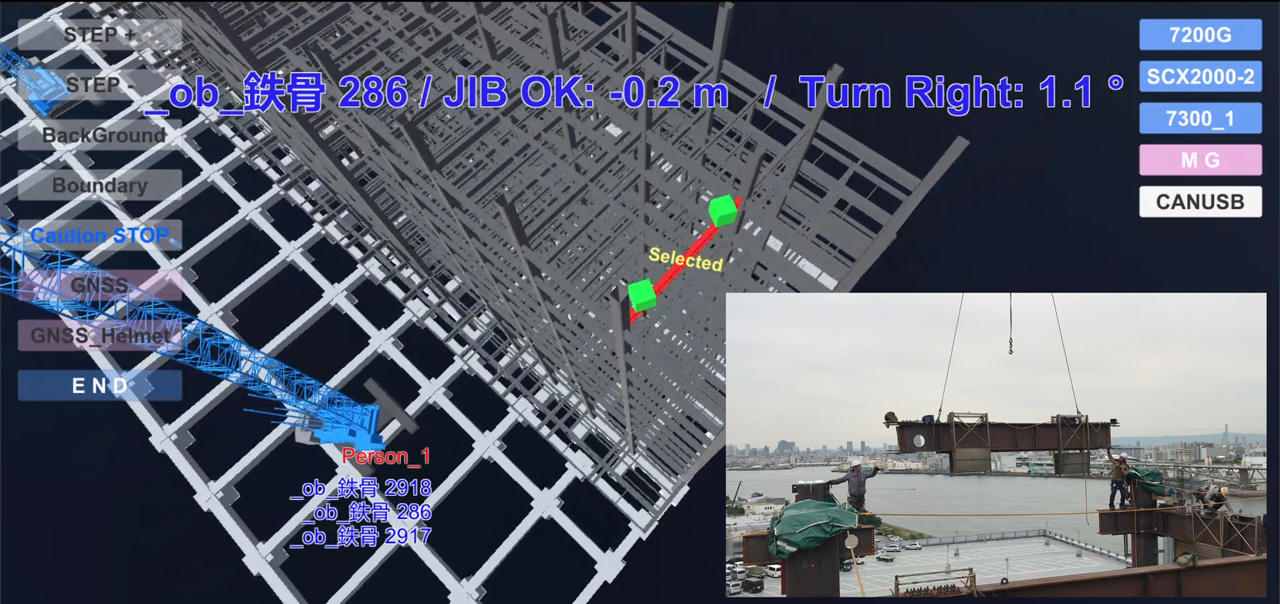
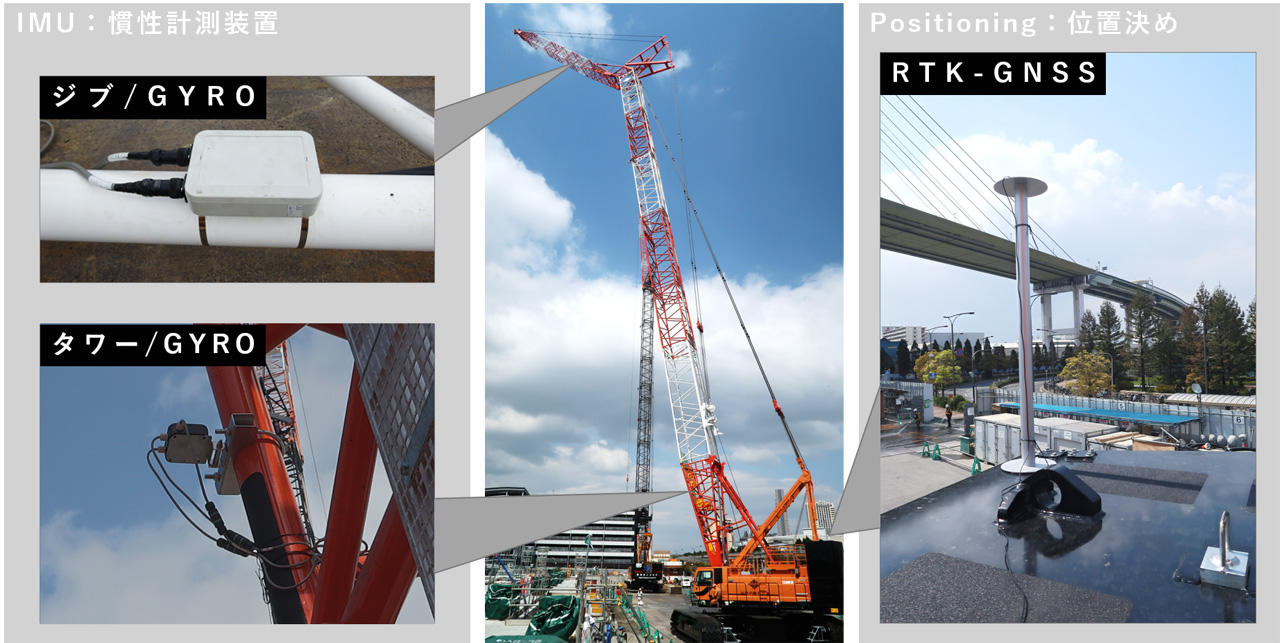
揚重対象となる部材の取り付け位置を画面上で選択すると、現在位置からのクレーンの操作量を数値化し、クレーンの動きに連動してリアルタイムに画面に表示します。揚重対象部材の取り付け位置の座標はBIM上の設計情報から、クレーンの動きはタワーとジブの2ヵ所に取り付けたジャイロセンサー(角度の変化を検出するセンサー)から、また、クレーンの位置はRTK-GNSS(※2)でそれぞれ取得し、誤差数cmの高い精度でガイダンスが可能です。
経験の浅いオペレーターでも画面に表示される操作量を参考にして操作できるため、運搬位置を指示する無線連絡の頻度が低減し、安全に効率よく作業ができます。これにより、熟練のオペレーターではなくても作業範囲が制限された建設現場での作業が容易となるため、オペレーター不足の解消にも有効なシステムです。
クレーンの機種を選ばず容易に取り付け可能
従来の作業範囲規制装置は、クレーンごとに専用に設計されているため他のクレーンへの転用が難しく、また、大型であるため取り付け作業にも労力がかかっていました。本システムでは、クレーンの位置およびタワーとジブの角度、旋回角度の情報を取得するセンサーをそれぞれユニット化し、クレーンの機種を問わず容易に後付けできるよう設計しました。
ユニットは持ち運びやすいサイズに分割しており、クレーンへの装着はボルト締めと配線ケーブルの接続のみで、特殊な工具や技能は不要なため、従来の作業範囲規制装置より設置費用が安価で扱いやすくなっています。
大林組は、本システムを建設現場で積極的に利用することで、クレーン作業の安全性と生産性をより一層高めるとともに、熟練オペレーターの不足問題に対応していきます。今後は、本システムをベースにしたAI・IoTおよびロボティクス技術のさらなる研究開発を進め、クレーンの自動・自律運転を実現し、労働力不足解消に向けた省力化・省人化を図ることにより社会のニーズに応えてまいります。
- ※1 サイバーフィジカルシステム(Cyber Physical Systems) 現実世界(フィジカル)で取得したセンサー情報をネットワークを介して収集し、コンピュータ上に構築した仮想空間(サイバー空間)で処理・分析・解析・知識化し、そこから得られた情報・計算値・推論値を現実世界へ反映させる取り組み
- ※2 RTK-GNSS 位置の分かっている周辺の基準局との相対測位により、リアルタイムに誤差数cmの高精度な位置情報を取得できるGNSS(全地球測位システム)の測位方式
以上
この件に関するお問い合わせ先
大林組 コーポレート・コミュニケーション室広報第一課
お問い合わせフォーム
プレスリリースに記載している情報は、発表時のものです。