油圧駆動の建設重機で力触覚技術を利用するシステムを実証しました
2種類の操作装置を開発し、実機での性能や作業性を確認
-
プレスリリース
株式会社大林組
慶應義塾大学
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)は、建設重機のオペレーターが重機の先端部が触れた物体の力や動き、触覚を得ながら作業できるよう、慶應義塾大学(理工学部システムデザイン工学科専任講師 野崎貴裕、グローバルリサーチインスティテュートハプティクス研究センター(センター長:村上俊之(理工学部教授)))と共同して開発した、力触覚(※1)を再現する技術「リアルハプティクス」を油圧駆動の建設重機に適用し性能・作業性を実証しました。

「リアルハプティクス」は、慶應義塾大学グローバルリサーチインスティテュートの大西公平特任教授が発明した「現実の物体や周辺環境との接触情報を双方向で伝送し、力触覚を再現する技術」です。人間が物体に触った際に感じる硬さや柔らかさ、風船のような弾力、自律的な動きなどの力触覚を伝送することで、遠隔にいる操作者の手元で同様の力触覚を再現できます。また、「リアルハプティクス」は、他のハプティクス(触覚技術)と異なり、機械駆動部が受ける反力を利用するため、触覚を検知するセンサーが極めて少なくて済むという特徴があり、センサーにとって過酷な外部環境にも適した技術です。
加えて操作側と駆動側の「力の倍率」や「距離の倍率」を任意に設定できるため、操作側の手元は小さい力やわずかな動きでも駆動側は数倍の力で大きく稼働させることが可能です。屋外環境で重量物を扱う建設重機との親和性が強いだけでなく、視覚と聴覚から得られる情報のみを頼りに操作しているオペレーターに、力触覚を導入・活用することで作業の安全性と効率の向上が期待できることから、大林組と慶應義塾大学は、2018年に建設重機に「リアルハプティクス」を適用するため、油圧駆動制御に適したアルゴリズムを開発しシステム化しました。
今回大林組は、開発したシステムを油圧ショベルの実機に適用し実証実験を行いました。駆動側となるグラップル(※2)を装着した油圧ショベルに、「力の倍率」を2,000倍、「距離の倍率」を16倍と設定し、操作側からの指示に基づきグラップルを稼働させ試験体を把持しました。その結果として、厚さ0.5mmの薄肉鋼管、H形鋼や木材など物性の違う10種類の建設資材に対して、いずれもオペレーターの手元で力触覚を再現し、非常に変形しやすい薄肉鋼管でもつぶすことなく把持しながら運ぶことができました。かつ、操作側の指示に対する駆動側の位置・加速度・力の3要素を計測して数値比較することで、設定した倍率どおりに稼働していることを定量的にも確認しました。
また、「リアルハプティクス」がない状態で同様の操作を実施したところ、試験体が変形しないよう視覚で確認しながら少しずつ握ることに時間がかかるなど、力触覚を感じることによる作業効率の向上を確認しました。加えて、既存の油圧駆動の重機に後からシステムを搭載することで、導入のための費用や期間が過大にならないことも確認しました。
実験に際して、実機の操作性を考慮し、操作側にはレバー型とグローブ型の2種類の装置を開発しました。レバー型は、オペレーターが力触角を感じながら最適な力加減で建設資材を把持するだけでなく、その把持した力加減を維持できる機能を持たせました。グローブ型は、ロボットの遠隔操作にも用いる装置を使用し、手の動きと実機のグラップルの動きが同期するため、重機の操縦に慣れてない人でも感覚的に操作することができます。
-
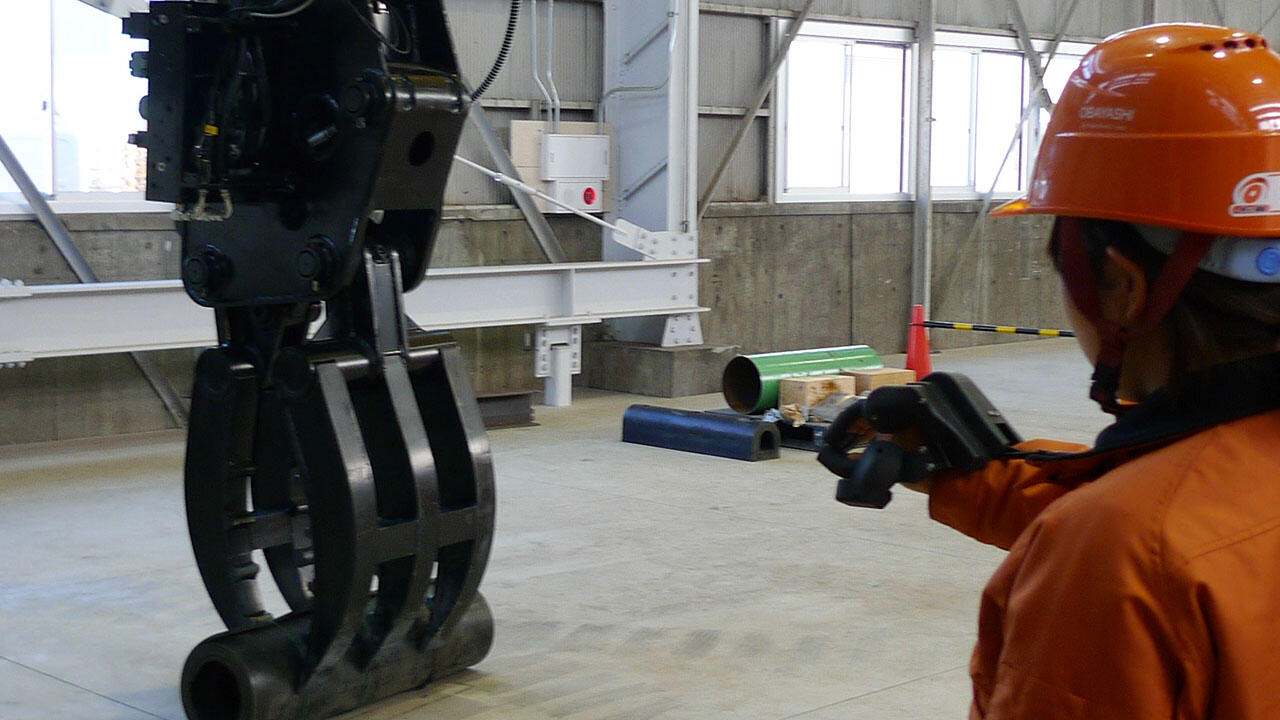
グローブ型のハンドを用いた検証風景
-

グローブ型のハンド
今後、「リアルハプティクス」のメリットを最大限活用するため、アーム型装置の開発など建設重機全体を感覚的に操作できるシステムを構築し、実用化をめざします。さらには、本システムを利用する熟練オペレーターの操作をデータ化することで、重機の自動運転化や若年技能労働者のトレーニングへの活用を図るなど、本システムの展開を図っていきます。
油圧駆動の建設重機で力触覚技術を利用するシステムの実証風景を動画でご覧いただけます
(動画再生時間:1分10秒)
- ※1 力触覚 触れた物の硬さや柔らかさを伝える力に関する感覚
- ※2 グラップル 油圧ショベルなどの重機の先端に取り付けるアタッチメントの一種で、物をつかむ爪のような形状をしている
以上
この件に関するお問い合わせ先
大林組 コーポレート・コミュニケーション室広報第一課
お問い合わせフォーム
慶應義塾広報室
TEL 03-5427-1541
研究に関するお問い合わせ先
慶應義塾大学 理工学部 システムデザイン工学科 専任講師
神奈川県立産業技術総合研究所 非常勤研究員
マサチューセッツ工科大学 客員研究員
野崎 貴裕(NOZAKI, Takahiro)
nozaki@sd.keio.ac.jp
プレスリリースに記載している情報は、発表時のものです。