桟橋下面の調査・点検ロボット
ピアグ®
遠隔操作型の無人水上機で海上桟橋の下面を点検します
ピアグとは?
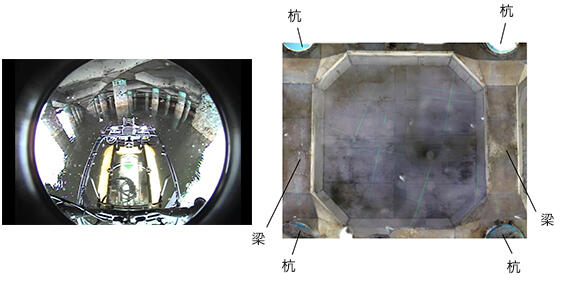
桟橋下面の点検を作業船や潜水士なしで、水上からの遠隔操作で行う無人水上機です。これまで海上桟橋下面の点検は、船上や桟橋下部に設置した足場上からの目視や、潜水士による水中からの目視で行っていましたが、海象状況などによる点検時間の制限や、点検者の熟練度による点検結果のばらつきなどの課題がありました。ピアグは、人力で投入可能で、水上の姿勢制御も自在にできるため、クリアな映像を撮影できます。
お客様のメリット
点検作業を効率化することでコストダウンできます
- 最大潜水時間や休憩時間などの時間制約がなく、24時間連続して点検できます。
- 桟橋下面と水面とのすき間が0.5mあれば点検が可能です。
- 効率を落とさず作業できるため、従来の作業船(船外機クラス)での点検に比べ、コストを15%縮減できます。
- 管理者が映像を見ながら構造物の状況をリアルタイムで確認できます。
姿勢制御に優れ、正確な遠隔操作が可能です
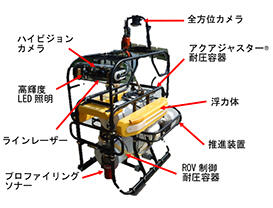
- 前後のスラスター(推進機)により、水上を自在に移動できます。
- ジャイロ効果を利用した超小型アクアジャスター®(※1)の搭載により、姿勢制御が容易にできます。
- ロボットは持ち運び可能な重量で、揚重機を用いず人力で投入できます。
クリアな映像を撮影し、クラックなどの計測も可能です
- 214万画素のハイビジョンカメラにより、クリアな映像を撮影できます。
- 画像詳細強化ソフトにより、桟橋下面の映像をクリアに撮影できます。
- ラインレーザーを照射することで、構造物のクラックの長さや幅を㎜単位で計測できます。
※1 アクアジャスター:ジャイロ効果(物体が回転することにより姿勢が乱されにくくなる効果)を利用し、水中における揚重作業時に吊り荷の方向を制御する大林組の保有技術

【実績・適用例】
民間所有の桟橋 2件
国土交通省中部地方整備局の新技術情報提供システム(NETIS)テーマ設定型へ参加し、現在評価中
【その他】
NETIS登録番号:KTK-180006-A
![]()