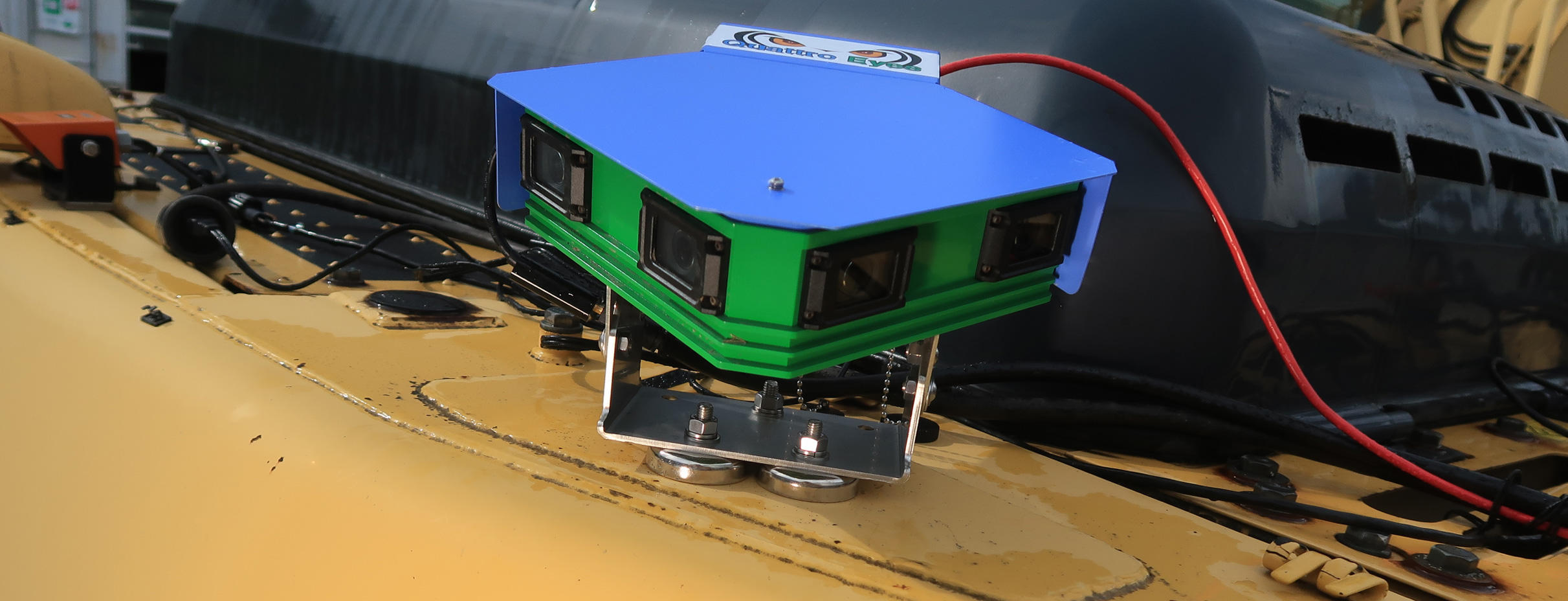
作業員の接近を検知して建設重機との接触を防止する安全装置「クアトロアイズ™」を開発しました
作業姿勢やヘルメット形状をAIに学習させ作業員の検知精度を飛躍的に向上
-
プレスリリース
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)は、あらかじめ現場作業員の作業姿勢やヘルメットの特徴を学習させたAIを活用することで、バックホウやクレーンなどの建設重機に設置した複数のカメラにより作業員を高精度に認識し、接近の恐れを検知すると強制的に重機を停止させて接触を防止する安全装置「クアトロアイズ」を開発しました。
建設現場において、重機と作業員の接触事故は死亡災害の主要な原因の一つとなっています。安全対策として、重機で作業を行う際には接触の危険がある区域に立入禁止措置を講じて作業員の接近を防止しますが、重機が停止中だと誤認し区域内に侵入してしまった場合や、重機に立入禁止措置を講じることが困難な移動中の不安全行動により接触事故が発生するリスクがあります。
これまでは超音波センサーでオペレーターの死角となる後方の物体を検知するものや、作業員に携帯させたICタグの電波を検知する安全装置がありましたが、資材や危険区域外の作業員にも反応して警報が頻発するなどの課題がありました。
近年ではこれらを解決すべく、カメラを利用して危険区域内の作業員のみを検知できるシステムが開発されていますが、作業員が屈む姿勢をとっていたり、大きな材料を運んでいる場合には正しく検知できないなど、検知の精度には依然として課題が残っていました。
今回開発した「クアトロアイズ」は、カメラで撮影した画像の認識処理にAIを活用することで作業員の検知精度が飛躍的に向上しています。建設現場で想定されるあらゆる作業姿勢を学習するとともに、世界中のヘルメットの特徴も学習することで、従来困難であった屈んだ姿勢や大きな材料を運んでいる作業員の検知が可能となります。
カメラにはステレオカメラを採用することで距離を正確に計測できるため、警戒が必要な距離に作業員が近づいた段階で警報を発するだけでなく、接触の恐れがある距離に近づいた場合は強制的に重機を停止する機能を備えました。これにより重機オペレーターや作業員の人的な判断にかかわらず重機が停止するため、接触事故を確実に防ぐことができます。

「クアトロアイズ」の特長は以下のとおりです。
作業姿勢とヘルメット形状の学習により作業員検知精度を飛躍的に向上
従来のカメラによる作業員検知システムでは、屈んだ姿勢や大きな材料に体が隠れた場合には作業員を検知できませんでした。「クアトロアイズ」は、最新のAI技術であるディープラーニングを利用した画像認識により、あらゆる作業姿勢の画像と、世界中のヘルメットをさまざまな角度から撮影した画像により特徴を学習することで、作業姿勢またはヘルメット形状のどちらか一方が検出された段階で作業員と判断することが可能となり、検知精度が飛躍的に向上しました。
建設現場内で実施した実証実験では、一般的なカメラによる作業員検知システムでは検知できなかった屈んだ姿勢や大きな材料を運んでいる作業員を検知することを確認しました。また、輝度補正などの画像処理技術を用いることで、トンネル坑内など20ルクス程度の比較的暗い作業場所や逆光にも対応が可能です。

建設重機の強制停止によるヒューマンエラーの排除
従来の安全装置は、重機オペレーターや作業員に対し警報を発するだけで、回避や停止の判断と操作は最終的に人間に委ねられていたため、正確に検知可能であってもヒューマンエラーによる接触事故が発生する可能性がありました。
「クアトロアイズ」は、ステレオカメラにより作業員との距離を正確に計測し、警戒距離に近づいたときに警報を発するだけでなく、さらに重機に近づき接触の恐れがある距離に至ったときには強制的に重機を停止させるため、ヒューマンエラーを排除でき、より安全性が高まります。警戒距離と接触危険距離は、10m以下の範囲で重機ごとに任意に設定することが可能です。
「クアトロアイズ」はバックホウやクレーン、フォークリフトなど多くの汎用重機に後から取り付けることが可能です。大林組は今後、「クアトロアイズ」を建設現場の重機に順次取り付けを進め、作業員と重機の接触事故を防止することで、安全で働きやすい作業環境を実現していきます。
以上
この件に関するお問い合わせ先
大林組 CSR室広報部広報第一課
お問い合わせフォーム
プレスリリースに記載している情報は、発表時のものです。