リアルハプティクスを利用した建設技能作業再現システムを開発
遠隔での左官作業における性能や作業性を実証しました
-
プレスリリース
株式会社大林組
慶應義塾大学
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)と慶應義塾大学 グローバルリサーチインスティテュートハプティクス研究センター(センター長:村上俊之《理工学部教授》、野崎貴裕《理工学部専任講師》)は共同で、力触覚(※1)を再現する技術「リアルハプティクス(※2)」を適用することで、左官作業における手の動きや力、力触覚を再現可能な建設技能作業再現システムを開発しました。
開発背景
近年、建設現場における建設機械の遠隔作業や自動化・自律化が積極的に進められており、特にAIによる画像認識などは人の視覚に代わる機能として活用されています。一方で、建設作業にはモルタルの硬さや重さをコテで感じながら建築物に塗る左官作業など、視覚に加えて力触覚を用いる作業も多く、今後、遠隔作業や自動化・自律化を進めるにあたっては力触覚を再現することが重要な要素の一つとなっています。
開発内容
本研究グループは、これまでも「リアルハプティクス」を油圧駆動の建設重機に適用するなど、建設現場における力触覚の活用に向けた実証を行ってきました。
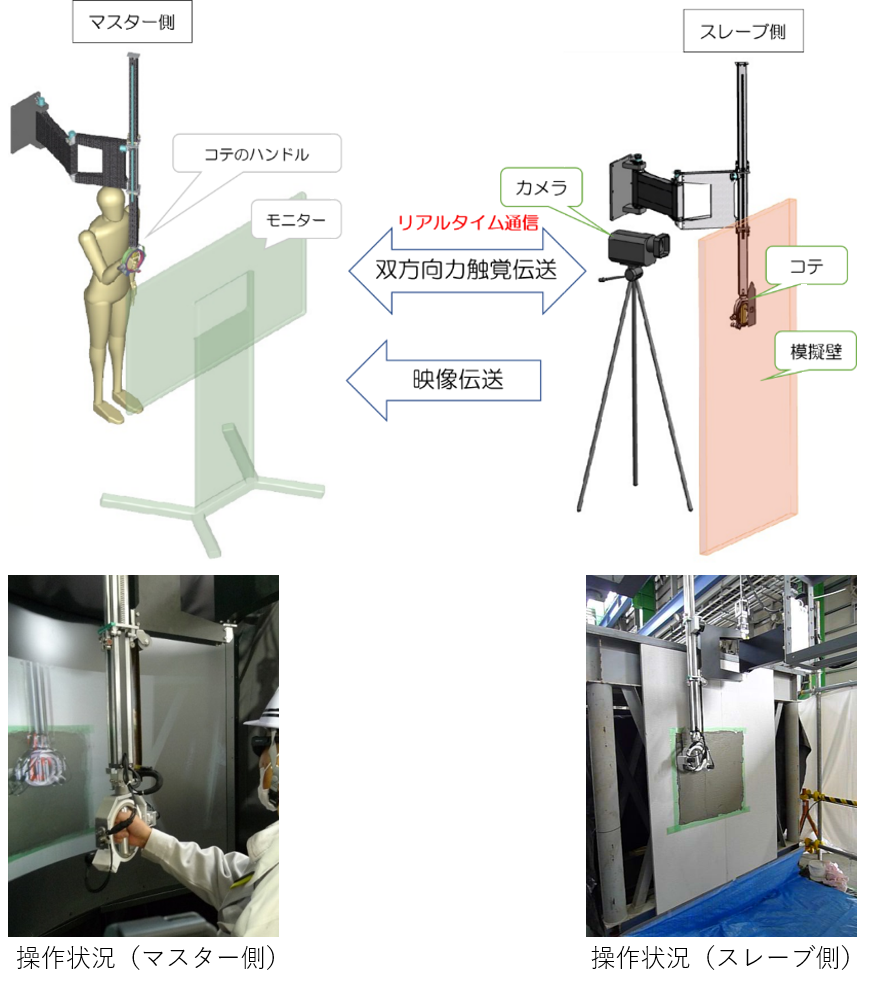
今回は新たに、視覚情報と力触覚情報を用いて遠隔での左官作業が可能となる建設技能作業再現システムを開発しました。このシステムは、人が操作するコテを模したハンドル装置(マスター)と、現地で動作するコテを設置したAvatarロボット(スレーブ)で構成されています。マスター側は、スレーブから送信された映像を視覚で確認しつつ、ハンドル部分ではコテの力触覚が再現されるため、実際に壁にコテを当てたかのような感触を感じながら作業ができます。スレーブ側は、マスターで動かしたハンドルの角度や力の入れ具合をリアルタイムに再現します。
開発結果
実証において、細かい表面の仕上がり状況など職人が必要とする視覚情報を取得するとともに、力触覚の伝達として厚さ1mm以下の精度でコテの動きを再現、微細な調整を可能にしたことで通常の左官作業と同等の仕上げ結果を再現できました。
今後の展開
今後、数百km離れた遠隔地での再現作業を予定しています。これからも引き続き世界中の建設現場や危険環境下の人的作業を技能労働者が移動することなく遠隔実施できる、安全かつ効率的な働き方に寄与する技術開発をめざしてまいります。
- ※1 力触覚
触れた物の硬さや柔らかさを伝える、力と位置変化に関する感覚 - ※2 リアルハプティクス
慶應義塾大学グローバルリサーチインスティテュートの大西公平特任教授が発明した現実の物体や周辺環境との接触情報を双方向で伝送し、力触覚を再現する技術。
人間が物体に触った際に感じる硬さや柔らかさ、風船のような弾力、自律的な動きなどの力触覚を伝送することで、遠隔にいる操作者の手元で同様の力触覚を再現できる。また、機械駆動部が受ける反力を利用するため、触覚を検知するセンサーが極めて少なくて済む
以上
この件に関するお問い合わせ先
大林組 コーポレート・コミュニケーション室 広報課
お問い合わせフォーム
慶應義塾 広報室
TEL 03-5427-1541
FAX 03-5441-7640
E-Mail:m-pr@adst.keio.ac.jp
https://www.keio.ac.jp/
研究内容についてのお問い合わせ先
慶應義塾大学 理工学部 専任講師
野崎 貴裕(NOZAKI, Takahiro)
E-Mail:nozaki@sd.keio.ac.jp
プレスリリースに記載している情報は、発表時のものです。