
2022. 04. 13
つくるを拓く人 #2 佐藤 正明 大本 絵利
自律運搬
「つくる」を支える、運ぶ技術
ものを運ぶ。それはものづくりに欠かせない技術であり、ものづくりの進化にしたがって、ものを運ぶ技術もまた進化してきた。運ぶ技術はどこまで来たのか。人が考えた手順や基準どおりに行う「自動化(Automation)」から、機械自らが手順や判断基準を見つけ出す「自律化(Autonomy)」へ。さらにその先にある、人とロボットがコミュニケーションする未来とは。大林組のビジネスイノベーション推進室で、自律運搬技術の研究開発に取り組む佐藤正明と大本絵利が展望を語る。
佐藤正明
大林組ビジネスイノベーション推進室 担当部長。トンネルの土木現場、高層オフィスなどの建築現場で施工管理に携わり、施工システムなどを開発する部門で工事機械管理を担当。現在はAGV(無人搬送車)/AMR(自律走行搬送ロボット)を活用した物流自動化プラットフォーム事業プロジェクトにてチームリーダーとして従事。 (写真右)
大本絵利
大林組ビジネスイノベーション推進室 副課長。大林組技術研究所にて建築現場の生産性向上に関する自動化、機械化、クライマー(宇宙エレベータープロジェクト)などの研究開発。現在はAGVプロジェクトに従事。(写真左)
自動化の歩み
運搬の研究は、大林組の歩みと同じだけの歴史があります。建設現場における機械化が一気に進んだとき、自動運搬の取り組みもまた進みました。
大林組の実績でいうと、1987年に、建設工事の自動化、情報化を積極的に推進した「全自動ビル建設システム(ABCS)」を発表。1995年には、巨大なキャノピー(仮設屋根)で建設現場を覆い、その下に取り付けたクレーンやリフトで資材などを搬送するという、自動化建設システム「BIG CANOPY」を世界で初めて実用化させています。

また自動運搬は、建築だけでなく、土木の現場でも活躍しています。例えばトンネルの工事で、掘った土砂を外へ運ぶベルトコンベヤー。断面を小型化したもの、磁力を用いたものなど、大林組はさまざまな方式を開発していますが、これも自動運搬といえます。
ほかにも、タワークレーンを使ったコンクリートの自動運搬システム。ダムの建設工事では、大量のコンクリートの運搬が必要になりますが、そのクレーン操作には熟練の技術が必要でした。この熟練オペレーターの操作を記憶し、再現するシステムを、大林組は開発しています。こうした技術はいずれも、重労働な現場の負担を、少しでも軽くするために日々活用されています。

-

全自動ビル建設システム「ABCS」
-

自動化建設システム「BIG CANOPY」
-

小断面トンネル用連続ベルトコンベヤー
-
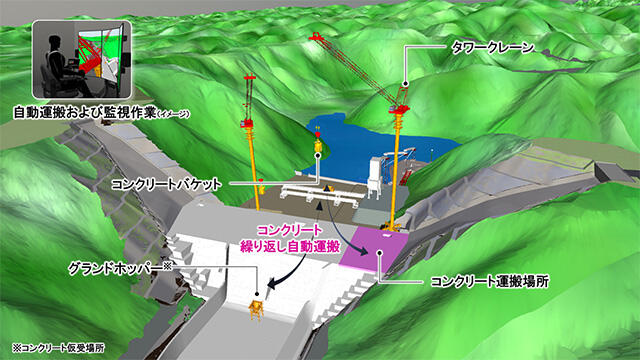
ダムのコンクリート自動運搬システム
-

建設機械を遠隔操縦装置で無人運転「サロゲート」
キーワードは「連携性」と「柔軟性」
どんな現場にも、その場所に応じた制約や課題があります。こうした課題は、一元的な対応が難しく、さまざまな技術を組み合わせてカスタマイズされた対応が必要になります。そのため重要になるのが、異なる機械が互いにつながる「連携性」と、それにより幅広い現場に対応できる「柔軟性」です。
例えば、いまでは当たり前の存在になったエレベーター。あらゆる工事現場で仮設エレベーターが使われていますが、これも一つの自動運搬技術です。
エレベーターを垂直方向の運搬としたとき、水平方向の運搬、つまりエレベーターの出口で受け取ったものを目的地まで運ぶ作業があります。この水平方向の自動運搬には、AGV(Automatic Guided Vehicle:無人搬送車)やAMR(Autonomous Mobile Robot:自律走行搬送ロボット)といった小型の輸送ロボットが使われます。こうしたロボットとエレベーターを連携させて、現場全体の生産性をどう高めていくのか。いま私たちが取り組んでいるのは、そのためのシステム開発です。

2020年、大林組は、AGVとエレベーターを連携して制御するロジスティクスシステムを発表しました。Web上で事前入力したスケジュールに基づいて、エレベーターの搬入からAGVの搬送までを完全に自動化。また建設現場に設置したカメラとも連携して、荷物の位置や置き方に問題がないかを自動でチェック。AIが作業領域への人の侵入を瞬時に検知し、危険と判断した場合はAGVの動作を停止させることが可能となっています。
大林組はAGV自体の開発も行っていますが、大林組のシステムは、さまざまなメーカーのロボットとの連携が可能です。どのメーカーの機械が使われているかは現場によって異なる中、こうした「連携性」と「柔軟性」を持たせることで、現場の生産性を高めるとともに、労働力不足の解消や作業員の身体的負担の軽減に貢献しています。


運搬の未来と可能性
自動運搬の可能性は、建設業にとどまるものではありません。運搬を自動化・自律化したいものの、既存の設備を更新することは難しい。建設現場と同様に、こうした現場ごとにカスタマイズされた対応が必要な課題は、例えば製造業や食品業、物流業にも存在しています。
特に、コロナ禍の影響もあり、安全に物流を効率化したいというニーズは日々高まっています。「連携性」と「柔軟性」を兼ね備えた大林組のシステムは、幅広い業界の現場においても活躍できると考えています。

より視野の大きな話をすると、自律運搬の研究とは、いわば現実世界の情報をデジタル言語に変換して、人とロボットがやりとりできるようにするものです。この延長線上にあるものとして、人とロボットが協働できる社会をつくりたいという思いがあります。
いまは人がロボットを導入するため試行錯誤している時代です。これが将来的には、人とロボットが互いにコミュニケーションをとり、一緒に働くことができる時代になっていく、いまはその過渡期と考えています。未来の循環型農業の姿を描いたCOMPACT AGRICULTURE構想も、この将来像を体現したものの一つです。こうした未来を拓いていくために、自分自身も、技術者として進化していきたいと思います。



